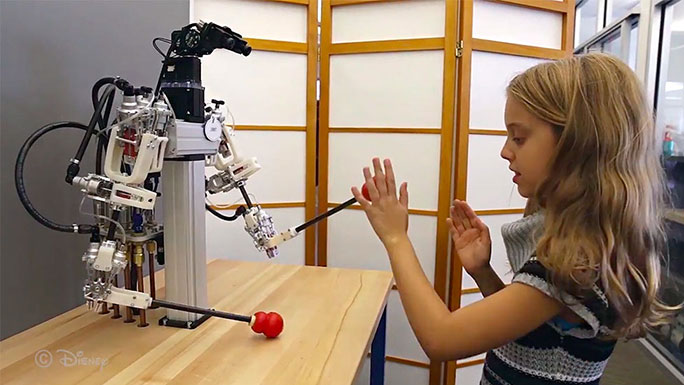
Los robots industriales antes eran enormes, difíciles de controlar y peligrosos, pero hoy, ya se encuentran nuevos robots seguros para humanos en las líneas de montaje, trabajando mano con mano con las personas. Sin embargo, estos robots son compañeros torpes: coexisten con nosotros, pero no colaboran de forma significativa.
Los robots suelen necesitar que se les indique explícitamente cómo ayudar o cuándo mantenerse al margen; algo que sus compañeros humanos suelen aprender de manera intuitiva. Un buen ayudante humano es un observador ávido, deduce reglas y costumbres no escritas, se fija en cómo trabajan los demás y entonces generaliza este conocimiento para aplicarlo en situaciones nuevas. Podemos hacerlo porque la mente humana es capaz de procesar información muy compleja de forma muy eficiente. Es un proceso que tradicionalmente ha resultado muy difícil para las máquinas.
Investigaciones recientes indican que, en la actualidad, nos encontramos en un punto de inflexión en cuanto a la manera en que los robots observan y procesan los datos, y por tanto de cómo trabajan con la gente.
Los expertos en robótica están empezando a invertir la ingeniería de la mente humana al traducir los modelos cognitivos que los humanos empleamos de manera intuitiva en modelos computacionales para que los utilicen las máquinas. Con este enfoque, los robots y los humanos que trabajan en parejas han sido capaces de ejecutar tareas complejas igual de bien o mejor que los equipos compuestos tan solo por humanos.
Las implicaciones son amplias. Imagine un robot que participa como miembro del equipo que planifica un dispositivo de emergencia, por ejemplo, tras un accidente. El robot escucha la conversación de los humanos y aprende automáticamente el plan de acción. No tendría que esperar hasta que alguien le dicte qué hacer, podría tomar la iniciativa de inmediato y completar tareas que ayuden al equipo a alcanzar sus objetivos. Es una capacidad que se espera de los humanos en situaciones de emergencia o de última hora, sin embargo, supone un cambio radical para los robots.
El reto es que ese diálogo colaborativo es complejo. Se desarrolla en ciclos, los acuerdos son fluidos y las propuestas a menudo se comunican y aceptan de forma implícita. El equipo puede considerar y rechazar muchas opciones, modificar el plan muchas veces. Para una máquina resulta complicado inferir nuestros planes de forma eficiente, lo más probable es que tenga que considerar y explorar billones de planes potenciales, incluso para un escenario sencillo con un par de objetivos y un equipo reducido.
Por el contrario, los integrantes humanos del equipo no necesitan horas tras una reunión para entender qué se ha acordado. Generalmente, somos capaces de salir de las reuniones con una idea clara del plan. Lo hacemos al construir andamios mentales que nos permiten juntar las piezas de la conversación. Cada miembro del equipo está motivado por los mismos objetivos, dispone de los mismos conocimientos básicos sobre las capacidades del equipo y cada sugerencia se considera dentro del contexto adecuado.
Mi grupo de investigación, el Grupo de Robótica Interactiva del Instituto Tecnológico de Massachusetts (MIT; EE.UU.), se aprovechó de este conocimiento para diseñar un modelo computacional que replica la estructura inherente de cómo un equipo discute y negocia un plan. Le introdujimos a la máquina únicamente algunos datos básicos –el número de miembros humanos del equipo, sus capacidades, los objetivos del equipo e información sobre las tareas-. La máquina los empleó para inferir el plan final al juntar las piezas que componían el plan con más probabilidades de funcionar en el contexto del problema. Por ejemplo, al indicarle a la máquina que el equipo disponía de cuatro miembros, pero de ocho tareas simultáneas, podría inferir que o bien el equipo trabajaba en modo multitarea o bien el plan se modificaba para ejecutarse de manera secuencial. El enfoque funcionó para responder ante situaciones de emergencia. Los equipos humanos elaboraron un complejo plan de respuesta y la máquina fue capaz de deducir el plan final con una precisión de hasta el 86% de media.
El mismo enfoque también permite a los robots aprender planes complejos con sólo observar cómo tomamos decisiones en nuestros trabajos. Nuestros últimos estudios demuestran que los robots pueden aprender las estrategias de toma de decisiones de los expertos que realizan tareas reales de defensa y atención sanitaria.
La clave consistió en diseñar la estructura de nuestro modelo para hacer un uso muy eficiente de cada observación sobre el experto humano. Cada decisión que toma un experto proporciona mucha información y revela cómo esa opción en concreto recibió una prioridad mayor que otras opciones. Diseñamos un modelo para aprovechar esta estructura lógica al transformar los datos observados en clasificaciones por pares de las opciones. Este enfoque mejoró notablemente la capacidad de la máquina de aprender un modelo de alta calidad de la estrategia de toma de decisiones del experto humano.
Esta técnica se aplicó con éxito en dos escenarios:
En el primero, los expertos participaron en un peligroso juego en el que había que defender unos barcos del peligro de varios ataques con misiles. Una máquina puede necesitar días o semanas para resolver este tipo de problema satisfactoriamente, pero los expertos humanos son capaces de tomar buenas decisiones rápidamente. Con el uso de nuestro modelo computacional estructurado, la máquina fue capaz de aprender estrategias eficaces a partir de tan sólo 16 demostraciones humanas. La máquina logró incluso superar la puntuación media de los expertos en muchas de las tareas.
En el segundo escenario, una máquina aprendió estrategias para coordinar la atención médica dentro de una unidad hospitalaria. En concreto, aprendió a tomar decisiones para decidir dónde y cuándo trasladar a los pacientes entre distintos tipos de habitación y cómo asignarles enfermeros, según diferentes condiciones de carga de trabajo. La tecnología se evaluó con experimentos en los que un robot proporcionó un apoyo para la toma de decisiones de enfermeros y médicos mientras decidían sobre los tratamientos de los pacientes en una simulación de gran realismo. El personal médico cumplió con las recomendaciones del robot en un 90%, una señal clara de que el robot había aprendido estrategias válidas y de calidad para la tarea.
Estos últimos avances indican que existe un tremendo potencial para que las máquinas colaboren con nosotros de manera enriquecedora para extender y aumentar la capacidad humana en muchos sectores de la economía. Los robots del futuro no necesitarán esperar en la banda a que se les diga exactamente qué hacer. Los robots estarán realmente a nuestro servicio, listos, dispuestos y capaces de aprender al observarnos. Trabajarán hombro con hombro con nosotros en las líneas de montaje, en hospitales y en la primera línea de las situaciones de emergencias. Los torpes robots del pasado serán sustituidos por valiosos miembros robóticos del equipo.
Actualidad Laboral / Con información de HBR / Julie Shah